Kuangji Zuo * , Gen Li * , Bofan Lyu , Yanshuo Lu , Boyu Ma , Shijia Han , Xinyu Zhou , Xichen Yuan , Chuhao Zhou , Jiaqi Bai , Geng Li , Jianfei Yang †
MARS Lab, Nanyang Technological University, Singapore
* Equal contribution. † Corresponding author.
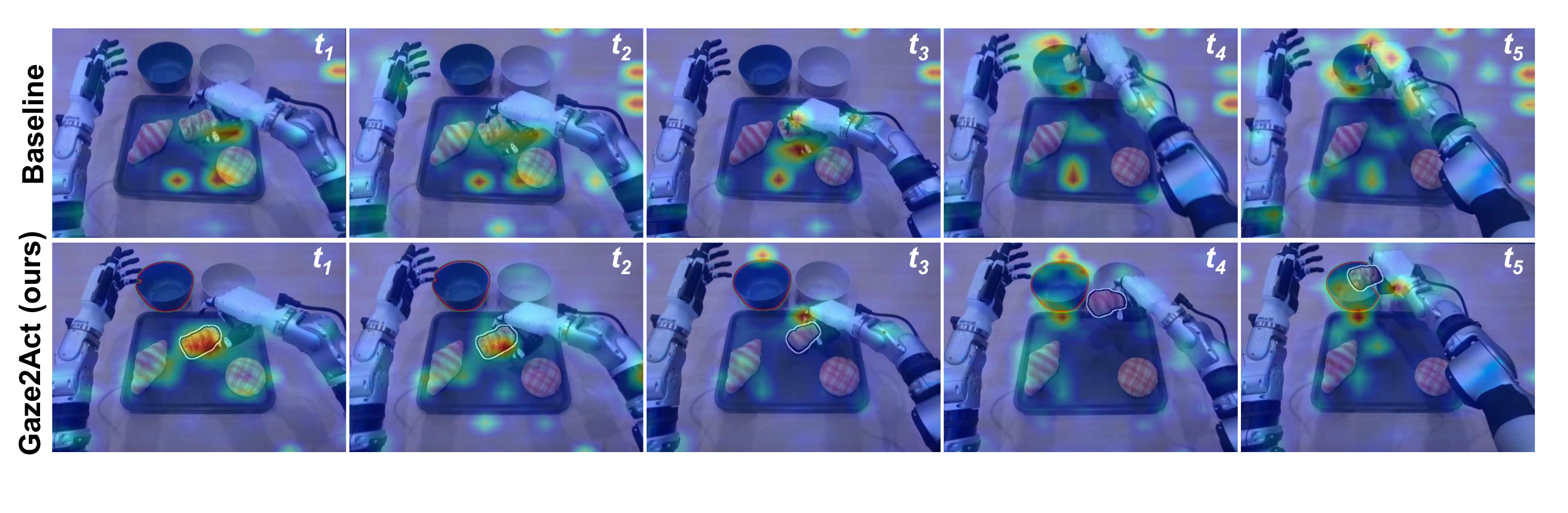
Human gaze acts as a natural, low-effort intent interface for human-in-the-loop VLA control, guiding object-level disambiguation, part-level interaction, and dynamic intent steering.